TxDuino: Configuration Builder in WxWidgets
In relation to the TxDuino (somewhat documented here), I wrote a C++ class to ease the interfacing with the device. That code was posted here. In this post, I am sharing a program that can be used to easily discover and save the configuration of the saturation points of the different actuators on a vehicle. The program is written using the wxWidgets toolkit so should be compatible with any wx- supported operating system. Of course, at this point in time I still haven't updated the TxDuino class with linux implementations yet, but hopefully that will happen soon.
The saturation points are the raw commands that correspond to the extreme
edges of the actuators range. For instance, if the actuator is a servo, then
the minimum saturation point is the minimum command that the servo can
actually achieve. If a command lower than that is sent, then the servo will
constantly jitter as it cannot actually achieve that rotation. By setting the
saturation points, normalized commands (percentages) can be sent to the device
using the TxDuino::setPercent() function.
A screenshot of the program in action is below:
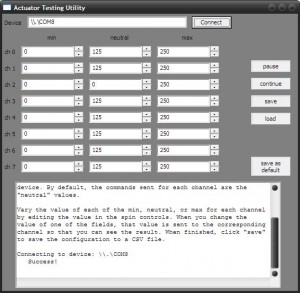
You can connect to the device by entering the device name in the text field at the top and clicking "Connect" (or pressing enter). Once the device is connected (success or failure will be reported in the console at the bottom), then commands can start being sent. You can start sending commands by clicking "Continue" or stop at any time by clicking "Pause". Note that "pausing" won't stop your vehicle from doing something retarded, the vehicle's actuators will just be stuck in the last commanded state. If the program is not paused, then every time you change one of the values in the spin controls, then that new value is sent as the current command.
To discover the value of the minimum saturation point of one of the actuators, start by clicking on the spin control for that channel, setting it to zero, and hitting enter (this makes the control think it has changed whether it has or not so the value is sent to that channel). If the actuator is saturated (on a servo, if it's making noise and/or jittering but not correcting itself) then raise the value by one unit. Keep raising the value until the actuator is no longer saturated. Repeat for the max saturation point and the neutral point. The neutral point is the point corresponding to 0%. For a servo this is most likely near the center of it's range. For a speed controller, it should be the same as the minimum saturation.
A windows binary of this program can be downloaded here:
Tester .
The source can be downloaded here:
TxDuino Actuator Configuration Tester.

Comments
Comments powered by Disqus